Чего не хватает сегодня
Дальние последовательности домашних хозяйств, следы манипуляций с несколькими камерами, тактильные неудачи в захвате, данные о вмешательстве и наборы оценочных данных, привязанные к реальным ограничениям при развертывании.

Собрание важных сигналов о следующем узком месте в робототехнике: какие данные еще отсутствуют, какие команды нужно собирать дальше и как подключать оборудование, телеоперацию, аннотацию, оценку, и развертывание в один реальный рабочий цикл.
Нам нужна одна комната, где лаборатории, стартапы, операторы и разработчики систем смогут сравнивать свои мнения о том, что происходит. все еще отсутствуют в наборах данных искусственного интеллекта: данные об отказах, тактильные сигналы, крайние случаи, следы восстановления, человеческие исправления, обратная связь с автопарком и рабочие процессы, специфичные для конкретной области.
Дальние последовательности домашних хозяйств, следы манипуляций с несколькими камерами, тактильные неудачи в захвате, данные о вмешательстве и наборы оценочных данных, привязанные к реальным ограничениям при развертывании.
Какие модальности данных сейчас наиболее важны, как далеко может зайти моделирование в одиночку, где стандарты аннотаций все еще нарушаются и какие новые ориентиры действительно нужны экосистеме.
Более четкая карта стека данных робототехники, практические шаблоны сбора и аннотирования, а также конкретные способы превратить доступ к оборудованию в готовые к обучению наборы данных.
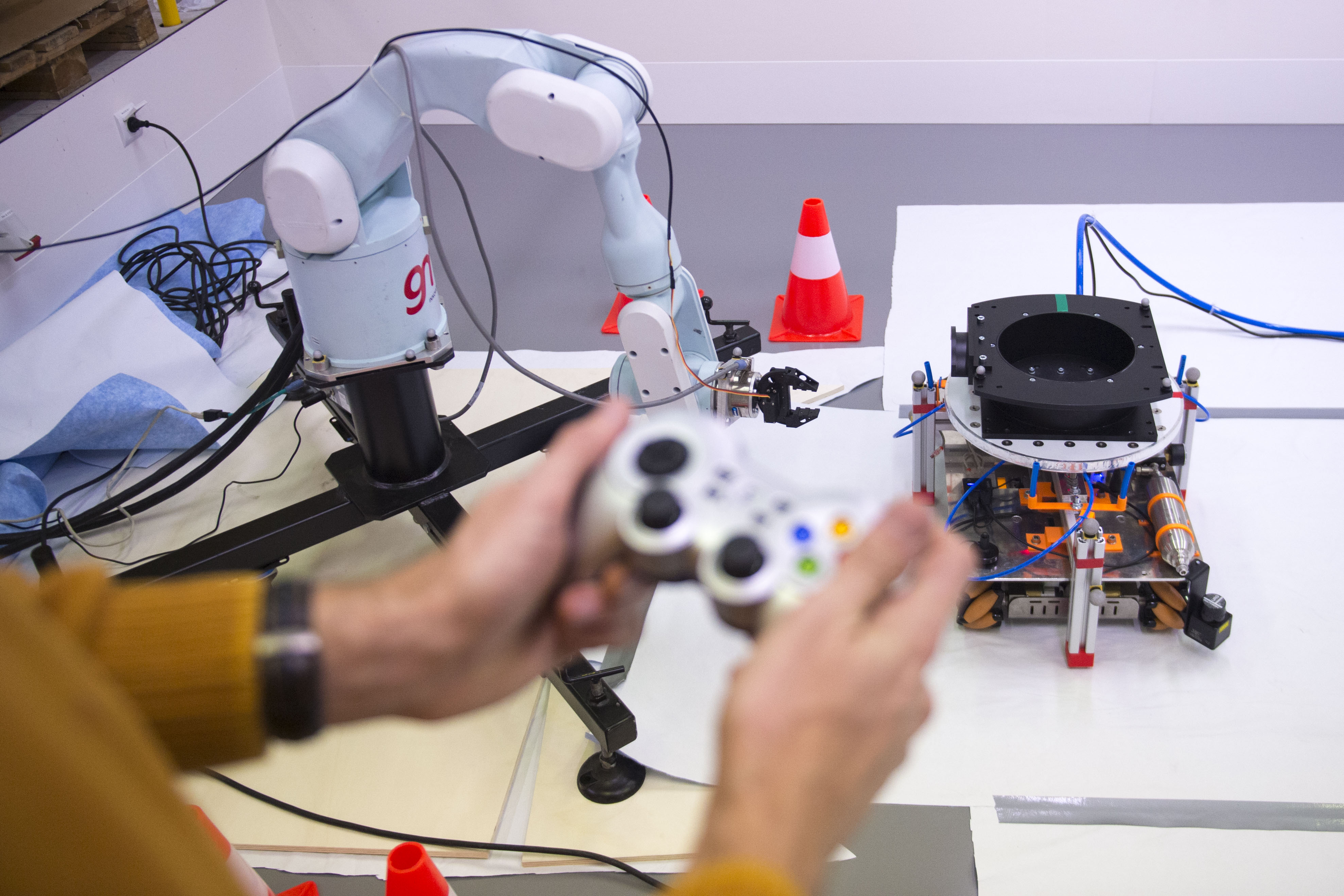
Не только слайды. Настоящие роботы, установки для сбора данных и рабочие процессы операторов на полу.

Наглядный, доступный и практичный инструмент для сбора демонстраций манипуляций, вмешательства оператора и быстрого выполнения задач.

Как выглядят ценные данные гуманоидов за пределами изолированных фрагментов: намерение, баланс, контакт, восстановление и стоимость надзора.

Как команды переходят от демонстраций к воспроизводимым конвейерам данных с телеоперацией, оценкой политики, контролем качества аннотаций и обратной связью из реального мира.
Следы сбоев, метки неопределенности, повторные попытки, тактильные взаимодействия и последовательности, в которых люди вмешиваются или корректируют политику.
Длинные видеоролики, насыщенные состояния манипулирования, мультимодальное согласование, политические намерения и метки событий, которые важны скорее с оперативной точки зрения, чем с визуальной.
Общие схемы, расширенные метаданные, предположения о переносе между роботами, происхождение телеоператоров, теги среды и структура, готовая к тестированию.
Автономный контроль качества связан с риском развертывания, эталонным покрытием для крайних случаев и циклами, которые связывают доказательства развертывания с приоритетами сбора данных.
Мы не хотим, чтобы саммит останавливался на фразе «данные важны». Мы хотим показать, что команды полного стека могут использовать: аппаратный доступ, телеоперация, мультимодальный захват, структурированные аннотации, контроль качества и платформа, которая поддерживает цикл.
OpenArm, гуманоиды, руки и мобильные системы, которые генерируют значимые данные взаимодействия, а не только игрушечные следы.
Teleop, изображения с камер, потоки состояний, журналы вмешательств и метаданные сеанса, которые расскажут вам, как на самом деле разворачивается задача.
Рубрики задач, роли рецензентов, причины отклонения, версионные аннотации и более чистый путь от необработанных носителей к готовым к обучению ресурсам.
Используйте телеметрию платформы, историю эпизодов и анализ отказов, чтобы решить, что собирать дальше, вместо того, чтобы ждать только интуиции.
Откроется демонстрационная площадка с роботизированными станциями, примерами сбора данных и пошаговыми руководствами по работе с платформой.
Исследователи и операторы сравнивают разрыв между текущими наборами данных и реальными потребностями развертывания.
Короткие, конкретные беседы о тактильных данных, телеоператорском наблюдении, пробелах в оценке и узких местах в аннотациях.
Команды могут сразу же принять интегрированное занятие по шаблонам сбора, схемы, контроля качества, аннотаций и хранения.
Контрольные показатели, общие форматы, недостающие методы и то, что может сделать данные робототехники в следующем году действительно лучше.
Познакомьтесь с исследователями, специалистами по аппаратному обеспечению, операторами данных и компаниями, создающими встроенные стеки искусственного интеллекта.