Lo que falta hoy
Secuencias domésticas de largo horizonte, trazas de manipulación de múltiples cámaras, fallos de agarre ricos en táctiles, datos de intervención y conjuntos de datos de evaluación vinculados a restricciones de implementación reales.

Una reunión de alto nivel sobre el próximo cuello de botella en robótica: qué datos aún faltan,
Queremos una sala donde laboratorios, startups, operadores y constructores de sistemas puedan comparar notas sobre lo que aún falta en los conjuntos de datos de IA incorporada: datos de fallos, señales táctiles, casos límite, trazas de recuperación, correcciones humanas, retroalimentación de flotas y flujos de trabajo específicos de dominio.
Secuencias domésticas de largo horizonte, trazas de manipulación de múltiples cámaras, fallos de agarre ricos en táctiles, datos de intervención y conjuntos de datos de evaluación vinculados a restricciones de implementación reales.
Qué modalidades de datos son más importantes ahora, hasta dónde puede llegar la simulación por sí sola, dónde aún se rompen los estándares de anotación y qué nuevos puntos de referencia necesita realmente el ecosistema.
Un mapa más claro de la pila de datos de robótica, patrones prácticos de recolección y anotación, y formas concretas de convertir el acceso al hardware en conjuntos de datos listos para entrenamiento.
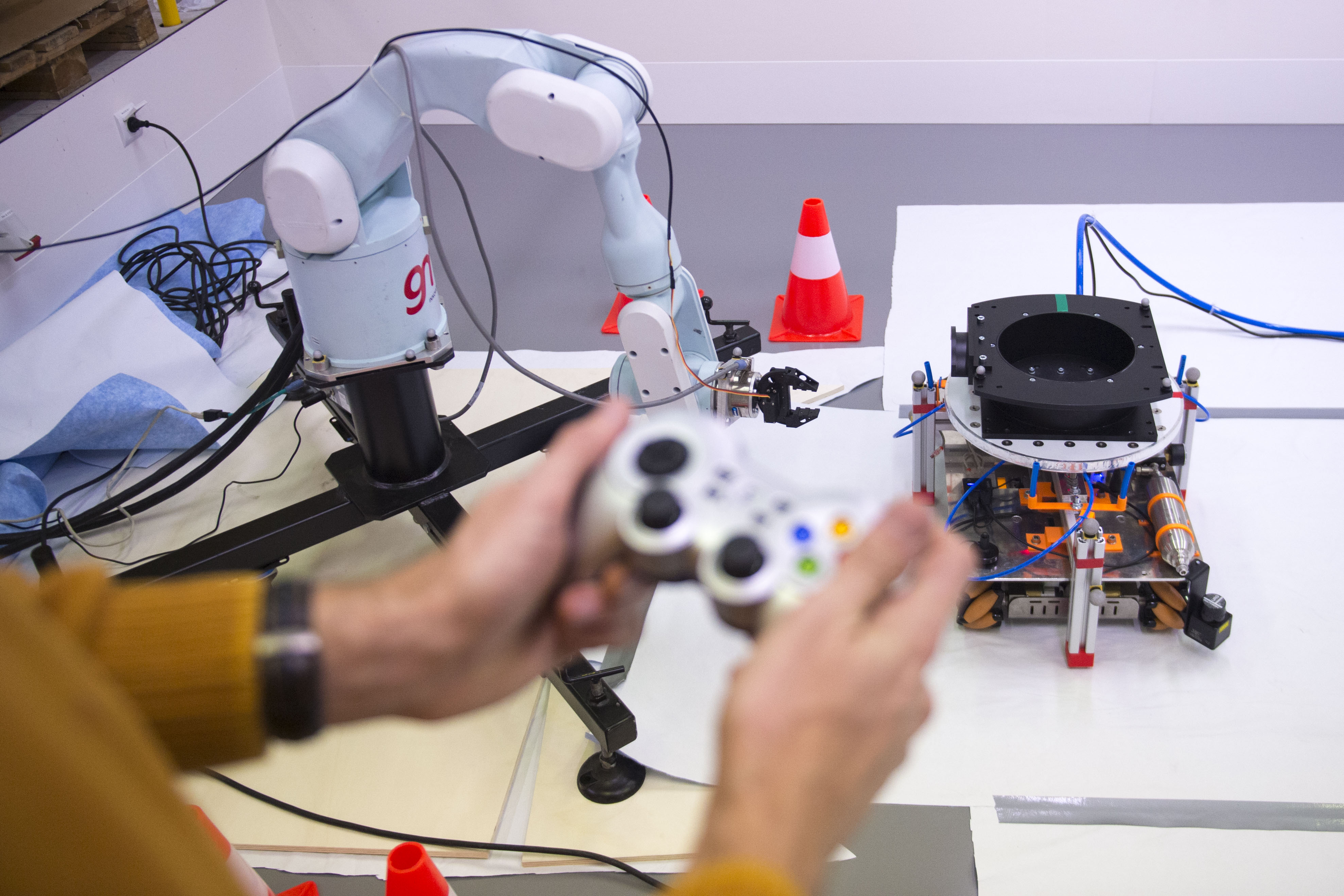
No solo diapositivas. Robots reales, equipos de recolección de datos y flujos de trabajo de operadores en el suelo.

Visibles, asequibles y prácticos para recolectar demostraciones de manipulación, intervenciones de operadores y iteraciones rápidas de tareas.

Cómo se ve un dato humanoide de alto valor más allá de clips aislados: intención, equilibrio, contacto, recuperación y costo de supervisión.

Cómo los equipos pasan de demostraciones a tuberías de datos repetibles con teleoperación, evaluación de políticas, control de calidad de anotaciones y retroalimentación del mundo real.
Huellas de fallo, etiquetas de incertidumbre, reintentos, interacciones táctiles y secuencias donde los humanos intervienen o corrigen una política.
Videos largos, estados de manipulación densos, alineación multimodal, intención de política y etiquetas de eventos que importan operativamente más que visualmente.
Esquemas compartidos, metadatos más ricos, supuestos de transferencia entre robots, procedencia de teleoperación, etiquetas de entorno y estructura lista para benchmarks.
QA offline vinculado al riesgo de implementación, cobertura de benchmarks para casos límite y bucles que conectan la evidencia de implementación de nuevo a las prioridades de recolección.
No queremos una cumbre que se detenga en "los datos son importantes". Queremos mostrar toda la pila que los equipos pueden usar: acceso a hardware, teleoperación, captura multimodal, anotación estructurada, QA y una plataforma que mantenga el ciclo en movimiento.
OpenArm, humanoides, manos y sistemas móviles que generan datos de interacción significativos en lugar de solo huellas de juguetes.
Teleoperación, vistas de cámara, flujos de estado, registros de intervención y metadatos de sesión que te dicen cómo se desarrolla realmente una tarea.
Rubricas de tarea, roles de revisores, razones de rechazo, anotaciones versionadas y un camino más limpio desde medios en bruto hasta activos listos para el aprendizaje.
Usar telemetría de la plataforma, historial de episodios y revisión de fallos para decidir qué recolectar a continuación en lugar de esperar solo a la intuición.
El piso de demostración se abre con estaciones de robots, ejemplos de recolección de datos y recorridos por la plataforma.
Investigadores y operadores comparan la brecha entre los conjuntos de datos actuales y las necesidades reales de implementación.
Charlas cortas y concretas sobre datos táctiles, supervisión teleoperada, brechas de evaluación y cuellos de botella en la anotación.
Una sesión integrada sobre captura, esquema, control de calidad, anotación y patrones de almacenamiento que los equipos pueden adoptar de inmediato.
Referencias, formatos compartidos, modalidades faltantes y lo que podría hacer que el próximo año de datos de robótica sea genuinamente mejor.
Conoce a investigadores, equipos de hardware, operadores de datos y empresas que construyen pilas de IA incorporada.