O que está faltando hoje
Sequências domésticas de longo prazo, rastros de manipulação de múltiplas câmeras, falhas de apreensão ricas em tato, dados de intervenção e conjuntos de dados de avaliação vinculados a restrições reais de implantação.

Um encontro de alto sinal sobre o próximo gargalo em robótica: quais dados ainda estão faltando,
Queremos uma sala onde laboratórios, startups, operadores e construtores de sistemas possam comparar notas sobre o que ainda está faltando nos conjuntos de dados de IA incorporada: dados de falhas, sinais táteis, casos extremos, rastros de recuperação, correções humanas, feedback de frota e fluxos de trabalho específicos de domínio.
Sequências domésticas de longo prazo, rastros de manipulação de múltiplas câmeras, falhas de apreensão ricas em tato, dados de intervenção e conjuntos de dados de avaliação vinculados a restrições reais de implantação.
Quais modalidades de dados são mais importantes agora, até onde a simulação pode ir sozinha, onde os padrões de anotação ainda falham e quais novos benchmarks o ecossistema realmente precisa.
Um mapa mais claro da pilha de dados de robótica, padrões práticos de coleta e anotação, e maneiras concretas de transformar o acesso ao hardware em conjuntos de dados prontos para treinamento.
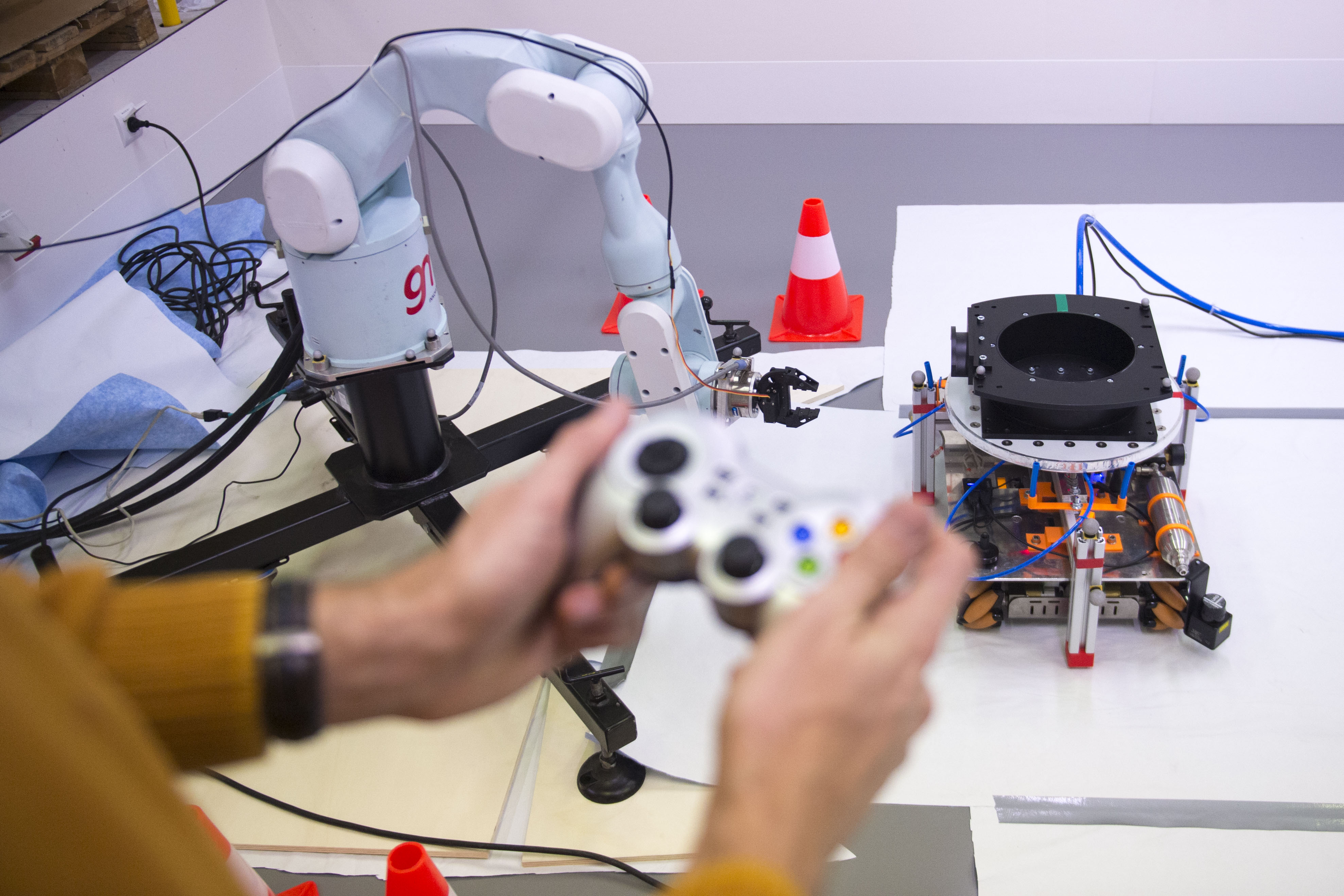
Não apenas slides. Robôs reais, equipamentos de coleta de dados e fluxos de trabalho de operadores no chão.

Visíveis, acessíveis e práticos para coletar demonstrações de manipulação, intervenções de operadores e iterações rápidas de tarefas.

Como é o dado humanoide de alto valor além de clipes isolados: intenção, equilíbrio, contato, recuperação e custo de supervisão.

Como as equipes passam de demonstrações para pipelines de dados repetíveis com teleoperação, avaliação de políticas, QA de anotação e feedback do mundo real.
Rastros de falha, rótulos de incerteza, tentativas, interações táteis e sequências onde humanos intervêm ou corrigem uma política.
Vídeos longos, estados de manipulação densos, alinhamento multimodal, intenção de política e rótulos de eventos que importam operacionalmente em vez de visualmente.
Esquemas compartilhados, metadados mais ricos, suposições de transferência entre robôs, proveniência de teleoperação, tags de ambiente e estrutura pronta para benchmark.
QA offline ligado ao risco de implantação, cobertura de benchmark para casos extremos e ciclos que conectam evidências de implementação de volta às prioridades de coleta.
Não queremos um cume que pare em "dados são importantes". Queremos mostrar toda a pilha que as equipes podem usar: acesso ao hardware, teleoperação, captura multimodal, anotação estruturada, QA e uma plataforma que mantém o ciclo em movimento.
OpenArm, humanos, mãos e sistemas móveis que geram dados de interação significativos em vez de rastros apenas de brinquedos.
Teleoperação, visões de câmera, fluxos de estado, logs de intervenção e metadados de sessão que informam como uma tarefa realmente se desenrola.
Rubricas de tarefa, papéis de revisores, razões de rejeição, anotações versionadas e um caminho mais limpo de mídia bruta para ativos prontos para aprendizado.
Use telemetria da plataforma, histórico de episódios e revisão de falhas para decidir o que coletar a seguir em vez de esperar apenas pela intuição.
O piso de demonstração abre com estações de robôs, exemplos de coleta de dados e passeios pela plataforma.
Pesquisadores e operadores comparam a lacuna entre os conjuntos de dados atuais e as necessidades reais de implantação.
Palestras curtas e concretas sobre dados táteis, supervisão de teleoperação, lacunas de avaliação e gargalos de anotação.
Uma sessão integrada sobre captura, esquema, QA, anotação e padrões de armazenamento que as equipes podem adotar imediatamente.
Referências, formatos compartilhados, modalidades ausentes e o que poderia tornar o próximo ano de dados de robótica genuinamente melhor.
Conheça pesquisadores, equipes de hardware, operadores de dados e empresas que estão construindo pilhas de IA incorporada.