今天缺什么
长视野家庭序列、多摄像机操作轨迹、丰富的触觉抓取失败、干预数据以及与实际部署约束相关的评估数据集。

我们想要一个房间,实验室、初创公司、运营商和系统构建者可以在这里交换意见 体现的人工智能数据集中仍然缺少:故障数据、触觉信号、边缘情况、恢复痕迹、 人工更正、车队反馈和特定领域的工作流程。
长视野家庭序列、多摄像机操作轨迹、丰富的触觉抓取失败、干预数据以及与实际部署约束相关的评估数据集。
现在哪种数据模式最重要,模拟可以单独走多远,注释标准仍然不符合哪些地方,以及生态系统实际需要哪些新基准。
更清晰的机器人数据堆栈图、实用的收集和注释模式以及将硬件访问转变为训练就绪数据集的具体方法。
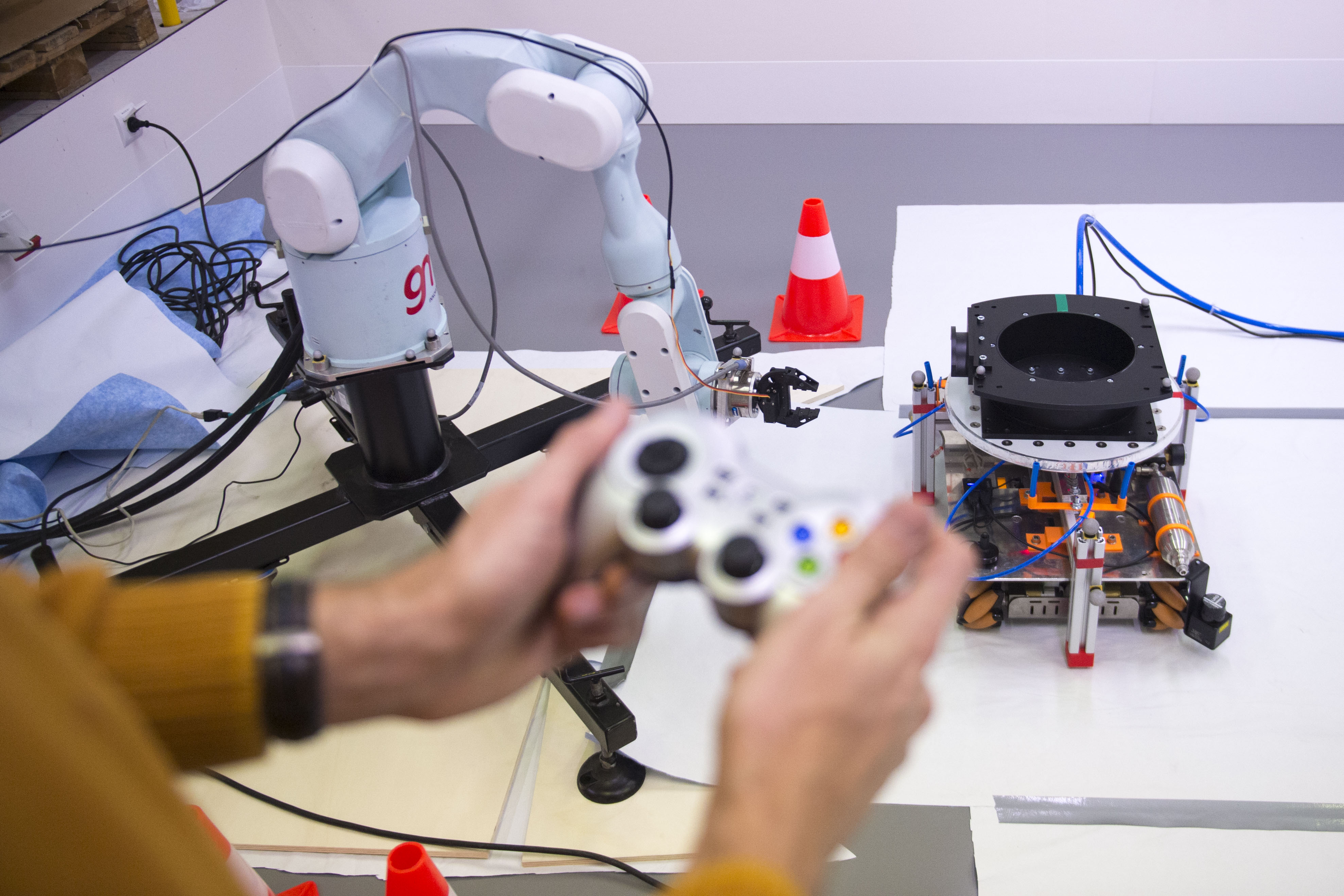
不仅仅是幻灯片。 真实的机器人、数据收集装置和操作员工作流程在现场。

可见、经济且实用,可用于收集操作演示、操作员干预和快速任务迭代。

除了孤立的片段之外,高价值的人形数据是什么样的:意图、平衡、联系、恢复和监督成本。

团队如何通过远程操作、策略评估、注释 QA 和现实世界反馈从演示转向可重复的数据管道。
失败痕迹、不确定性标签、重试、触觉交互以及人类干预或纠正策略的顺序。
长视频、密集的操纵状态、多模式对齐、政策意图和事件标签在操作上而不是在视觉上很重要。
共享模式、更丰富的元数据、跨机器人传输假设、远程操作来源、环境标签和基准测试结构。
离线 QA 与部署风险、边缘案例的基准覆盖范围以及将推出证据连接回收集优先级的循环相关联。
我们不希望峰会停留在“数据很重要”上。 我们想要展示团队可以使用的完整堆栈: 硬件访问、远程操作、多模式捕获、结构化注释、QA 以及保持循环运行的平台。
OpenArm、人形机器人、手和移动系统,可生成有意义的交互数据,而不是纯玩具痕迹。
Teleop、摄像机视图、状态流、干预日志和会话元数据告诉您任务实际如何展开。
任务细则、审阅者角色、拒绝原因、版本化注释以及从原始媒体到学习就绪资产的更清晰路径。
使用平台遥测、事件历史记录和故障审查来决定下一步要收集什么,而不是仅仅等待直觉。
演示区开始展示机器人站、数据收集示例和平台演练。
研究人员和运营商比较了当前数据集和实际部署需求之间的差距。
关于触觉数据、远程操作监督、评估差距和注释瓶颈的简短而具体的讨论。
关于捕获、模式、QA、注释和存储模式的集成会议团队可以立即采用。
基准、共享格式、缺失的模式,以及什么可以让明年的机器人数据真正变得更好。
认识研究人员、硬件团队、数据运营商和构建具体人工智能堆栈的公司。