今日足りないものは何ですか
長期にわたる家庭内のシーケンス、マルチカメラ操作の追跡、触覚に富んだ把握の失敗、介入データ、および実際の展開の制約に関連付けられた評価データセット。

ロボット工学の次のボトルネックでの高信号の収集: まだ不足しているデータは何ですか、 チームが次に何を収集する必要があるか、またハードウェア、遠隔操作、注釈、評価を接続する方法、 そして実際の 1 つの運用ループに展開します。
研究室、新興企業、オペレーター、システムビルダーが、現状についてのメモを比較できる 1 つの部屋が必要です。 身体化された AI データセットにはまだ欠けているもの: 故障データ、触覚信号、エッジ ケース、回復トレース、 人間による修正、フリートのフィードバック、ドメイン固有のワークフロー。
長期にわたる家庭内のシーケンス、マルチカメラ操作の追跡、触覚に富んだ把握の失敗、介入データ、および実際の展開の制約に関連付けられた評価データセット。
現在最も重要なデータ モダリティは何か、シミュレーションだけでどこまでできるのか、アノテーション標準がまだ破られているのはどこなのか、そしてエコシステムが実際に必要としている新しいベンチマークは何か。
ロボット データ スタックの明確なマップ、実用的な収集と注釈のパターン、ハードウェア アクセスをトレーニング可能なデータセットに変える具体的な方法。
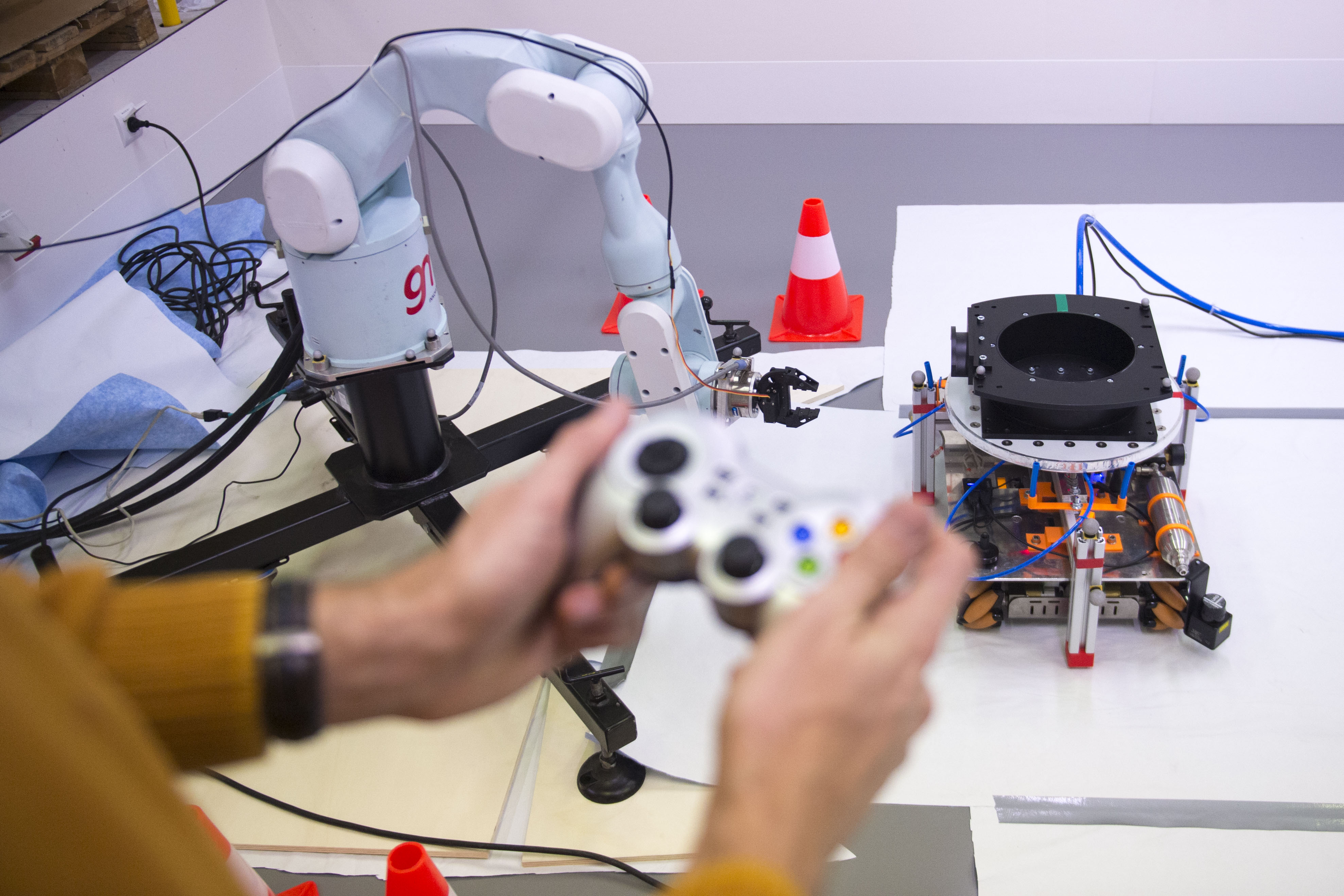
スライドだけではありません。 フロア上の実際のロボット、データ収集リグ、オペレーターのワークフロー。

見やすく、手頃な価格で、操作のデモンストレーション、オペレーターの介入、および迅速なタスクの反復を収集するのに実用的です。

孤立したクリップを超えた価値の高い人型データはどのようなものになるのか: 意図、バランス、接触、回復、および監督コスト。

チームがテロップ、ポリシー評価、アノテーション QA、現実世界のフィードバックを使用して、デモから反復可能なデータ パイプラインに移行する方法。
失敗の痕跡、不確実性のラベル、再試行、触覚的インタラクション、および人間が介入したりポリシーを修正したりするシーケンス。
長いビデオ、高密度の操作状態、マルチモーダルな調整、ポリシーの意図、および視覚的ではなく操作上重要なイベント ラベル。
共有スキーマ、より豊富なメタデータ、クロスロボット転送の仮定、テロップの来歴、環境タグ、ベンチマーク対応の構造。
オフライン QA は、導入リスク、エッジ ケースのベンチマーク カバレッジ、およびロールアウトの証拠を収集の優先順位に結び付けるループに関連付けられています。
「データは重要だ」ということで終わるサミットは望んでいません。 チームが使用できるフルスタックを示したいと思います。 ハードウェア アクセス、遠隔操作、マルチモーダル キャプチャ、構造化アノテーション、QA、ループを動かし続けるプラットフォーム。
OpenArm、ヒューマノイド、ハンド、およびモバイル システムは、おもちゃのみのトレースではなく、意味のあるインタラクション データを生成します。
タスクが実際にどのように展開するかを示すテロップ、カメラ ビュー、状態ストリーム、介入ログ、およびセッション メタデータ。
タスクのルーブリック、レビュー担当者の役割、拒否理由、バージョン管理された注釈、および生のメディアから学習可能なアセットへのよりクリーンなパス。
直感だけを待つのではなく、プラットフォーム テレメトリ、エピソード履歴、障害レビューを使用して、次に何を収集するかを決定します。
デモ フロアは、ロボット ステーション、データ収集の例、プラットフォームのウォークスルーで始まります。
研究者と運用者は、現在のデータセットと実際の導入ニーズとのギャップを比較します。
触覚データ、テロップ監視、評価ギャップ、アノテーションのボトルネックに関する短く具体的な話。
キャプチャ、スキーマ、QA、アノテーション、ストレージ パターンに関する統合セッションで、チームはすぐに採用できます。
ベンチマーク、共有フォーマット、不足しているモダリティ、そして来年のロボット データを真に改善できるものは何か。
研究者、ハードウェア チーム、データ オペレーター、および具体化された AI スタックを構築する企業を紹介します。